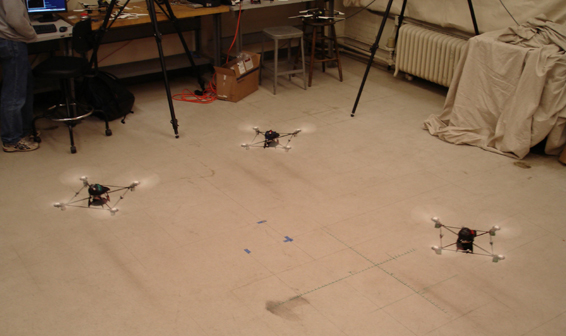
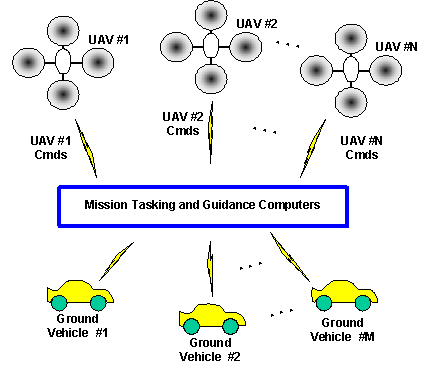
The purpose of this quad rotor, multi-vehicle flight test was to demonstrate the platform's capability to implement multi-vehicle missions ... all » using the task advisor to run the entire mission. In this video we demonstrate the tasking system's capability to command two autonomous UAVs (Note: the quadrotors are Draganflyer V Ti Pros controlled by a ground computer) to search different areas of the room and track multiple objects - both stationary and moving. In this test, we have three R/C vehicles on the floor, and the two air vehicles search for them. Note that the system does not know where the ground vehicles are going to be a-priori. The videos are from a test flight which took place on August 8th. This is the shortened version of the original video clip. This is the full clip
 From ZDnet:
From ZDnet:As recent events have shown, military forces around the world are more and more relying on small unmanned aerial vehicles (UAVs) for surveillance missions. But these UAVs usually need many skilled operators to control them. Now, the Boston Globe reports that a new MIT 'air force' is ready for help. MIT researchers have developed a multiple-UAV test platform which can be operated by anyone with a high-speed Internet connection. And these small and inexpensive helicopters could soon stay in the air for a week, automatically coming back to their base and landing to recharge their batteries. But read more…
This multiple-UAV test platform has been developed by Jonathan How, an associate professor at MIT in charge of the Aerospace Controls Laboratory, and his graduate systems. Here is what he says to the Boston Globe about his lab and the drones developed there.










No comments:
Post a Comment